Marathon Story
Valencia Marathon (Espagne)
3 décembre 2023
Gaëtan Horlin (BEL) – n° 4987
La préparation
Après avoir utilisé le même plan d’entrainement pour mes cinq derniers marathons, j’estimais qu’il était peut-être temps d’en changer en vue du marathon de Valence (soit mon 14ème marathon), le 3 décembre 2023. En effet, bien que ce plan m’ait permis d’établir un « record perso » sur marathon (2h58 à Rotterdam et à Cologne), en ayant fait usage de ce même plan l’année dernière sur le marathon de Florence, j’ai « perdu pied » déjà dès le 15ème kilomètre, comme on peut le voir sur le graphique à ci-dessous.
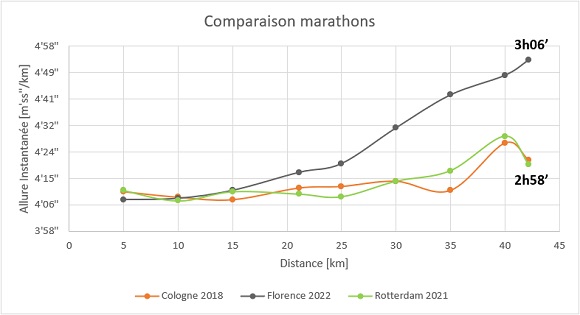 Celui-ci indique également que, même sur mes « meilleurs » marathons, j’ai connu une baisse de régime en fin d’épreuve. Je ne pense pas qu’il s’agissait de ce qu’on appelle communément le « mur », mais quand-même. Mon plan précédent comportait 5 sorties hebdomadaires, étalées sur 12 semaines. Cette année, après mon inscription sur le marathon de Valence, je me suis donc mis en quête d’un nouveau plan, idéalement en 16 semaines, voire même plus. L’organisation du marathon de Valence proposait justement un plan gratuit en 16 semaines. J’y ai donc souscrit. Le seul problème, c’est que le plan était envoyé chaque dimanche par E-mail pour la semaine suivante. Il n’y avait donc aucune visibilité de bout-en-bout ! Pas facile donc de planifier quoi que ce soit… Je me suis dit que j’allais commencer avec ce plan en 16 semaines et que s’il ne me convenait pas, je repasserais sur mon plan habituel en 12 semaines. Au final, je suis resté sur le plan en 16 semaines fourni par l’organisation du marathon de Valence, d’autant qu’il comportait des séances de renforcement musculaire et de gainage. Jamais dans mes plans de préparation marathon antérieurs je n’avais introduit de gainage ni de renforcement musculaire, malgré tout le bien qu’on en dise. Introduire de telles séances était également une donnée que je voulais changer dans ma préparation pour le marathon de Valence.
Celui-ci indique également que, même sur mes « meilleurs » marathons, j’ai connu une baisse de régime en fin d’épreuve. Je ne pense pas qu’il s’agissait de ce qu’on appelle communément le « mur », mais quand-même. Mon plan précédent comportait 5 sorties hebdomadaires, étalées sur 12 semaines. Cette année, après mon inscription sur le marathon de Valence, je me suis donc mis en quête d’un nouveau plan, idéalement en 16 semaines, voire même plus. L’organisation du marathon de Valence proposait justement un plan gratuit en 16 semaines. J’y ai donc souscrit. Le seul problème, c’est que le plan était envoyé chaque dimanche par E-mail pour la semaine suivante. Il n’y avait donc aucune visibilité de bout-en-bout ! Pas facile donc de planifier quoi que ce soit… Je me suis dit que j’allais commencer avec ce plan en 16 semaines et que s’il ne me convenait pas, je repasserais sur mon plan habituel en 12 semaines. Au final, je suis resté sur le plan en 16 semaines fourni par l’organisation du marathon de Valence, d’autant qu’il comportait des séances de renforcement musculaire et de gainage. Jamais dans mes plans de préparation marathon antérieurs je n’avais introduit de gainage ni de renforcement musculaire, malgré tout le bien qu’on en dise. Introduire de telles séances était également une donnée que je voulais changer dans ma préparation pour le marathon de Valence.
Au final, et en comparant mon plan précédent en 12 semaines et le nouveau en 16 semaines, il ressort que :
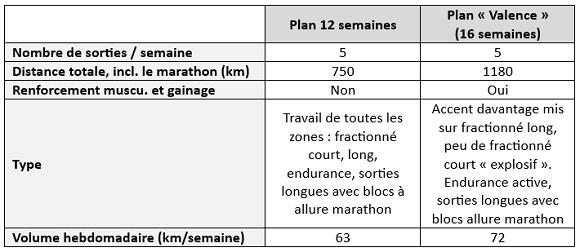 En résumé, le plan « Valence » en 16 semaines, comparé à mon plan antérieur, c’était évidemment 4 semaines de plus, du gainage et du renforcement musculaire, un travail accentué dans des zones différentes et davantage de volume. Sur certaines sorties, j’ai également mis plus d’intensité (fractions plus rapides) que ce qui était requis par le plan. Je me souviens fort bien de cette sortie de 17 km qui incluait 10×1000 m…
En résumé, le plan « Valence » en 16 semaines, comparé à mon plan antérieur, c’était évidemment 4 semaines de plus, du gainage et du renforcement musculaire, un travail accentué dans des zones différentes et davantage de volume. Sur certaines sorties, j’ai également mis plus d’intensité (fractions plus rapides) que ce qui était requis par le plan. Je me souviens fort bien de cette sortie de 17 km qui incluait 10×1000 m…
Tout ce “travail” semblait déjà porter ses fruits durant le mois précédant le marathon. D’abord sur une course locale pourtant fort vallonnée courue à allure « rapide », alors qu’il n’est pas monnaie courante que je puisse courir un 10 km sous les 4’/km. Deux semaines avant le marathon, j’ai pris part à un semi-marathon à Deauville (en fait un marathon relais à deux, avec Delphine), couru en 1h22’ (nouveau record perso sur semi) à l’allure inespérée de 3’53’’/km. Ca m’a donné un énorme boost de confiance ! Maintenant, il fallait confirmer à Valence ! L’objectif premier y était un « Sub 3 » puis faire mieux que 2h58’, voire m’approcher aussi près que possible de 2h55’ mais ça, je n’y croyais pas trop vu la probable baisse de régime en fin de marathon. Côté équipement, je reste fidèle aux chaussures Saucony Ride, que j’utilise depuis des années. Je n’ai pas encore essayé les chaussures avec plaque de carbone.
Le Marathon
Vendredi 1er décembre, c’est le jour du départ,  nous sommes quinze membres de la Mons Running Team (MRT), des Trottineurs de Soignies, coureurs.euses (dont cinq pour qui ce sera le premier marathon à Valence !) et accompagnant.e.s à nous retrouver à l’aéroport de Charleroi. Atterrissage un peu « chahuté » à Valence, il y a beaucoup de vent mais le soleil est bien présent et la température avoisine 20°. Nous avons croisé Amaury Paquet, qui vise la qualification pour les JO de Paris 2024. Après avoir pris possession des voitures de location et nous être installés dans la (spacieuse) villa louée à l’écart du centre Valence, nous sommes allés chercher nos dossards dans le centre-ville. Pas facile de se garer à Valence… Samedi en matinée, dernière sortie d’entrainement au soleil, histoire de faire tourner les jambes.
nous sommes quinze membres de la Mons Running Team (MRT), des Trottineurs de Soignies, coureurs.euses (dont cinq pour qui ce sera le premier marathon à Valence !) et accompagnant.e.s à nous retrouver à l’aéroport de Charleroi. Atterrissage un peu « chahuté » à Valence, il y a beaucoup de vent mais le soleil est bien présent et la température avoisine 20°. Nous avons croisé Amaury Paquet, qui vise la qualification pour les JO de Paris 2024. Après avoir pris possession des voitures de location et nous être installés dans la (spacieuse) villa louée à l’écart du centre Valence, nous sommes allés chercher nos dossards dans le centre-ville. Pas facile de se garer à Valence… Samedi en matinée, dernière sortie d’entrainement au soleil, histoire de faire tourner les jambes.  Après-midi, reconnaissance du trajet (voiture + métro) à faire dimanche, pour se rendre au départ du marathon. Nous en avons profité pour visiter le site de l’arrivée du marathon, à savoir la cité des Arts et des Sciences de Valence, à l’architecture futuriste et similaire à celle de la « nouvelle » gare de Mons… C’est le même architecte (Santiago Calatrava). Il fait beau, nous sommes en T-shirt. Au soir, à la villa, c’était « Pasta Party », concoctée (entre autres) par Salvatore. Je me sens stressé, je me mets (trop) la pression…
Après-midi, reconnaissance du trajet (voiture + métro) à faire dimanche, pour se rendre au départ du marathon. Nous en avons profité pour visiter le site de l’arrivée du marathon, à savoir la cité des Arts et des Sciences de Valence, à l’architecture futuriste et similaire à celle de la « nouvelle » gare de Mons… C’est le même architecte (Santiago Calatrava). Il fait beau, nous sommes en T-shirt. Au soir, à la villa, c’était « Pasta Party », concoctée (entre autres) par Salvatore. Je me sens stressé, je me mets (trop) la pression…
Dimanche 3 décembre, c’est le jour « J », attendu depuis de nombreux mois. Malgré l’excitation du moment, j’ai assez bien dormi.  Debout à 5 heures, je dois avoir mangé (ce qui se trouve sur la photo à gauche) au plus tard 3 heures avant le départ, soit au plus tard à 5h25, le départ étant donné à 8h25 en ce qui me concerne. A 6h15, nous quittons tous la villa, il fait très frais, 4°… Voiture, métro, changement de métro, tout se passe comme prévu et comme reconnu hier. En ville, nous croisons quelques fêtards attardés et éméchés. Le jour se lève, il est déjà temps pour moi de prendre congé de mes Ami.e.s en vue de rejoindre « mon » box de départ, via un rapide passage par la consigne pour y déposer mon sac. Il y a beaucoup de monde, 30.000 participants.
Debout à 5 heures, je dois avoir mangé (ce qui se trouve sur la photo à gauche) au plus tard 3 heures avant le départ, soit au plus tard à 5h25, le départ étant donné à 8h25 en ce qui me concerne. A 6h15, nous quittons tous la villa, il fait très frais, 4°… Voiture, métro, changement de métro, tout se passe comme prévu et comme reconnu hier. En ville, nous croisons quelques fêtards attardés et éméchés. Le jour se lève, il est déjà temps pour moi de prendre congé de mes Ami.e.s en vue de rejoindre « mon » box de départ, via un rapide passage par la consigne pour y déposer mon sac. Il y a beaucoup de monde, 30.000 participants.
Je rejoins mon box, le box rose (2h50 > 2h59). Je me positionne tout à l’arrière, je n’ambitionne pas de faire 2h50 ! Il y a bien assez de place pour y faire mes déboulés, talons-fesses et autres montées de genoux. Ca fait monter le rythme cardiaque et ça évite de partir complètement à froid. A bientôt 53 ans (dans 2 mois, je constate que ce genre de montée en régime avant la course est de plus en plus indispensable. A quelques minutes du départ, je me sens étonnamment serein, la pression est maintenant retombée, même si tout reste à faire. J’y suis, maintenant il n’y a plus rien d’autre à penser qu’à courir. Les conditions sont idéales, 5°, pas de vent.  Les élites ont pris le départ à 8h15. A 8h25, c’est à mon tour de partir. La « foule » est dense, ça n’est pas facile de trouver son rythme. J’essaie aussi vite que possible de trouver le mien car toute distance courue en-dessous de l’allure cible, c’est autant qu’il faudra courir plus rapidement par la suite. Je remonte lentement le peloton, quitte parfois à monter sur le trottoir pour dépasser certains concurrents. Je suis derrière les meneurs d’allure 3 heures. Le 1er kilomètre est franchi après 4’22’’, soit 12’ plus « lentement » que l’allure cible. Je continue à dépasser des participants si bien que l’allure moyenne du 2ème kilomètre est maintenant de 4’15’’/km. Etant donné que beaucoup de gens restent derrière les meneurs d’allure, je me décide à les dépasser entre le 2ème et le 3ème kilomètre car devant eux, il y a bien plus d’espace. De fait, l’allure moyenne du 3ème kilomètre est de 3’58’’/km. C’est trop rapide, il faut que je me calme, je sais que tout excès de « zèle » en début de course se paiera à la fin (baisse de régime) ! Par la suite, mon allure se stabilise, j’ai trouvé la bonne position dans le groupe, et je m’y tiens. Après 5 kilomètres, mon allure moyenne depuis le départ est de 4’10’’/km, c’est top. Sur ma montre, je ne regarde rien d’autre que l’allure moyenne, sur laquelle j’essaie de me calquer religieusement. Arrive le 1er ravitaillement. Jusqu’à présent, j’ai toujours pris l’habitude de m’arrêter aux ravitaillements durant les courses. Pas cette fois, car d’une part, je me sens très bien et que d’autre part, l’âge avançant, toute rupture de régime demande un effort respiratoire supplémentaire pour revenir dans le rythme (du moins, c’est ma perception personnelle en ce qui concerne les adaptations liées à l’avancement en âge). J’ai donc pris la bouteille d’eau qui m’était tendue, l’ai bue partiellement plusieurs fois et l’ai gardée durant quelques centaines de mètres avant de m’en séparer. Au 7ème kilomètre, j’ai pris mon premier gel. C’est un hydrogel, pas besoin d’eau pour l’avaler, il est davantage aqueux qu’un gel « normal » mais fait 60 ml au lieu de 40. Ce sont les gels « GO Isotonic » de chez SIS
Les élites ont pris le départ à 8h15. A 8h25, c’est à mon tour de partir. La « foule » est dense, ça n’est pas facile de trouver son rythme. J’essaie aussi vite que possible de trouver le mien car toute distance courue en-dessous de l’allure cible, c’est autant qu’il faudra courir plus rapidement par la suite. Je remonte lentement le peloton, quitte parfois à monter sur le trottoir pour dépasser certains concurrents. Je suis derrière les meneurs d’allure 3 heures. Le 1er kilomètre est franchi après 4’22’’, soit 12’ plus « lentement » que l’allure cible. Je continue à dépasser des participants si bien que l’allure moyenne du 2ème kilomètre est maintenant de 4’15’’/km. Etant donné que beaucoup de gens restent derrière les meneurs d’allure, je me décide à les dépasser entre le 2ème et le 3ème kilomètre car devant eux, il y a bien plus d’espace. De fait, l’allure moyenne du 3ème kilomètre est de 3’58’’/km. C’est trop rapide, il faut que je me calme, je sais que tout excès de « zèle » en début de course se paiera à la fin (baisse de régime) ! Par la suite, mon allure se stabilise, j’ai trouvé la bonne position dans le groupe, et je m’y tiens. Après 5 kilomètres, mon allure moyenne depuis le départ est de 4’10’’/km, c’est top. Sur ma montre, je ne regarde rien d’autre que l’allure moyenne, sur laquelle j’essaie de me calquer religieusement. Arrive le 1er ravitaillement. Jusqu’à présent, j’ai toujours pris l’habitude de m’arrêter aux ravitaillements durant les courses. Pas cette fois, car d’une part, je me sens très bien et que d’autre part, l’âge avançant, toute rupture de régime demande un effort respiratoire supplémentaire pour revenir dans le rythme (du moins, c’est ma perception personnelle en ce qui concerne les adaptations liées à l’avancement en âge). J’ai donc pris la bouteille d’eau qui m’était tendue, l’ai bue partiellement plusieurs fois et l’ai gardée durant quelques centaines de mètres avant de m’en séparer. Au 7ème kilomètre, j’ai pris mon premier gel. C’est un hydrogel, pas besoin d’eau pour l’avaler, il est davantage aqueux qu’un gel « normal » mais fait 60 ml au lieu de 40. Ce sont les gels « GO Isotonic » de chez SIS (Science in Sport). Au 8ème kilomètre, nous croisons la tête de la course de l’autre côté de l’avenue ; ils en sont, eux, à leur 15ème kilomètre. Je me sens capable d’accélérer un peu mais en faisant très attention quand-même car, sur base de l’expérience de mes marathons précédents, tout excès de zèle précoce se « paiera » plus loin, probablement d’autant plus tôt que cet excès sera marqué… Dans le public massé au bord de la route, j’entends “Allez Gaëtan !” Je me retrourne, nos regards se croisent mais je ne connais pas la personne. Elle a lu mon prénom sur mon dossard. Ca fait quand-même très plaisir. Au passage du 10ème kilomètre, mon allure moyenne depuis le début est descendue à 4’06’’/km. Au ravito, je prends la bouteille d’eau, la bois à petites gorgées mais je ne m’arrête toujours pas. Je me sens bien, j’ai trouvé le « bon rythme », même si je me dis que c’est probablement un peu trop rapide. On vient de passer à côté d’une grande tour, la « Rotonda del Mirador ». Il y a toujours des gens autour de moi mais c’est nettement plus aéré qu’au départ, on ne se marche plus sur les pieds. Un thermomètre urbain indique 12°, le ciel est bleu azur et il n’y a pas de vent. Au 13ème kilomètre, je me surprends à me laisser submerger par l’émotion… Bizarre, ça n’est pas le moment pourtant, l’arrivée est encore loin ! Au 14ème kilomètre, je prends mon second gel. Ensuite, arrive le ravito, je prends l’eau mais je ne m’arrête toujours pas. Au 15ème kilomètre, l’allure moyenne depuis le départ se maintient à 4’06’’/km, tout va toujours bien. Arrive le 17ème km, j’ai un coup de mou, mon allure instantanée baisse légèrement et je repense au marathon de Florence l’année passée où, déjà au 15ème kilomètre, je n’ai plus su tenir l’allure. Tout me vient à l’esprit : est-ce que je ne suis pas parti trop vite ? La fin va probablement être très dure. Est-ce que je suis encore capable de courir un marathon à une allure soutenue ?… Tout d’un coup, j’ai une inquiétante sensation de faiblesse, comme si j’allais défaillir et m’écrouler… Ca n’a heureusement duré que quelques secondes mais c’est la première fois que je ressentais ça, et ça n’est pas agréable du tout. Est-ce lié à la prise de glucose ? Pic d’insuline ? Je ne sais pas et sur le moment-même, je n’y ai même pas pensé, je continuerai donc à prendre un gel tous les 7 kilomètres environ. Toujours est-il que j’essaie de me reconcentrer uniquement sur le jalon majeur à venir, à savoir la passage du semi-marathon. Mon coup de barre est passé. D’une allure à 4’09’’/km sur le 17ème kilomètre, 4’08’’/km sur le 18ème, je suis à 4’01’’/km sur le 19ème. C’est reparti, mais j’ai eu peur ! Le semi est passé en 1h27’05’’. En comptant la baisse de régime à venir, je me dis que le sub 3 est possible, tout dépendra de quand cette baisse de régime surviendra et quelle en sera l’ampleur. Au 22ème kilomètre, je prends mon 3ème gel. Un peu plus loin, Estelle, Titi et John sont sur le bord de la route, ils m’encouragent (voir leur photo ci à droite).
(Science in Sport). Au 8ème kilomètre, nous croisons la tête de la course de l’autre côté de l’avenue ; ils en sont, eux, à leur 15ème kilomètre. Je me sens capable d’accélérer un peu mais en faisant très attention quand-même car, sur base de l’expérience de mes marathons précédents, tout excès de zèle précoce se « paiera » plus loin, probablement d’autant plus tôt que cet excès sera marqué… Dans le public massé au bord de la route, j’entends “Allez Gaëtan !” Je me retrourne, nos regards se croisent mais je ne connais pas la personne. Elle a lu mon prénom sur mon dossard. Ca fait quand-même très plaisir. Au passage du 10ème kilomètre, mon allure moyenne depuis le début est descendue à 4’06’’/km. Au ravito, je prends la bouteille d’eau, la bois à petites gorgées mais je ne m’arrête toujours pas. Je me sens bien, j’ai trouvé le « bon rythme », même si je me dis que c’est probablement un peu trop rapide. On vient de passer à côté d’une grande tour, la « Rotonda del Mirador ». Il y a toujours des gens autour de moi mais c’est nettement plus aéré qu’au départ, on ne se marche plus sur les pieds. Un thermomètre urbain indique 12°, le ciel est bleu azur et il n’y a pas de vent. Au 13ème kilomètre, je me surprends à me laisser submerger par l’émotion… Bizarre, ça n’est pas le moment pourtant, l’arrivée est encore loin ! Au 14ème kilomètre, je prends mon second gel. Ensuite, arrive le ravito, je prends l’eau mais je ne m’arrête toujours pas. Au 15ème kilomètre, l’allure moyenne depuis le départ se maintient à 4’06’’/km, tout va toujours bien. Arrive le 17ème km, j’ai un coup de mou, mon allure instantanée baisse légèrement et je repense au marathon de Florence l’année passée où, déjà au 15ème kilomètre, je n’ai plus su tenir l’allure. Tout me vient à l’esprit : est-ce que je ne suis pas parti trop vite ? La fin va probablement être très dure. Est-ce que je suis encore capable de courir un marathon à une allure soutenue ?… Tout d’un coup, j’ai une inquiétante sensation de faiblesse, comme si j’allais défaillir et m’écrouler… Ca n’a heureusement duré que quelques secondes mais c’est la première fois que je ressentais ça, et ça n’est pas agréable du tout. Est-ce lié à la prise de glucose ? Pic d’insuline ? Je ne sais pas et sur le moment-même, je n’y ai même pas pensé, je continuerai donc à prendre un gel tous les 7 kilomètres environ. Toujours est-il que j’essaie de me reconcentrer uniquement sur le jalon majeur à venir, à savoir la passage du semi-marathon. Mon coup de barre est passé. D’une allure à 4’09’’/km sur le 17ème kilomètre, 4’08’’/km sur le 18ème, je suis à 4’01’’/km sur le 19ème. C’est reparti, mais j’ai eu peur ! Le semi est passé en 1h27’05’’. En comptant la baisse de régime à venir, je me dis que le sub 3 est possible, tout dépendra de quand cette baisse de régime surviendra et quelle en sera l’ampleur. Au 22ème kilomètre, je prends mon 3ème gel. Un peu plus loin, Estelle, Titi et John sont sur le bord de la route, ils m’encouragent (voir leur photo ci à droite).  En réponse j’essaie de leur faire un cœur avec mes mains mais je dois déjà manquer un peu de lucidité car, à la place, c’est un signe « tout va bien » (comme les plongeurs) que je fais avec chacune de mes mains. Ces encouragements me donnent un énorme coup de boost, merci les Amis ! D’ailleurs le 22ème kilomètre est couru en 4’00’’. Et en parlant d’encouragements, sur le marathon d’Anvers, on entendait souvent “goed bezig !” (bon boulot). En Italie, c’était “dai ragazzi !” (allez les gars)… et en Espagne, c’est “animo !” (courage). Le 25ème kilomètre est celui couru le plus rapidement, en 3’54’’. L’allure moyenne depuis le départ est maintenant de 4’05’’/km. De temps-en-temps, sur base de mes sensations du moment, je me projete sur le chrono final possible, sachant que la baisse de régime surviendra tôt ou tard. Entre le 27ème et le 29ème kilomètre, ça devient à nouveau un peu plus dur, les kilomètres me paraissent plus long et à nouveau cette sensation soudaine et inquiétante, mais tout autant passagère qu’il y a 10 kilomètres, de faiblesse extrême. Seconde frayeur, mais qui n’a heureusement pas duré. Je prends mon 4ème gel au 29ème kilomètre, on vient de passer en face des tours de Serranos. Au 30ème kilomètre, je me sens à nouveau bien et sans raideurs ou douleurs dans le bas du dos, contrairement à mes marathons précédents. Depuis trois semaines avant le marathon, je fais des exercices quotidiens pour la prévention de la lordose lombaire ; ils semblent porter leurs fruits. Pas non plus de signes de crampes ni d’ampoules au pieds, tout va bien donc. Au 30ème kilomètre, l’allure moyenne depuis le départ se maintient à 4’05’’/km. Le 32ème kilomètre est couru en 3’56’’. Alors que sur tous les ravitos jusqu’à présent (tous les 5 kilomètres environ), j’ai toujours pris de l’eau sans marquer de temps d’arrêt, cette fois (33 ème kilomètre), je marque un bref arrêt. Je n’ai pas de difficulté à repartir mais je me dis que la perte de régime habituelle ne peut être qu’imminente à présent, et qu’il faudra bientôt y aller “au mental”. L’allure du 34ème kilomètre est de 4’22’’/km, ça devient plus difficile, mes quadriceps et, dans une moindre mesure, mes mollets sont de plus en plus durs. Chaque fois que je ralentis ou que j’ai l’impression de ralentir, j’arrive toujours néanmoins à relancer. J’en suis très agréablement étonné ! Arrive le 35ème kilomètre, je prends mon 5ème et dernier gel. Je scrute le panneau indiquant le kilomètre suivant. En effet, les kilomètres me semblent à présent de plus en plus “longs”. Toutefois, mon allure moyenne est toujours excellente, 4’06’’/km. Mes quadris et mollets deviennent de plus en plus durs, certes, mais je n’ai toujours pas de baisse de régime significative. A moins d’une grosse défaillance, le sub 3 me semble désormais presque acquis. Je m’arrête à nouveau brièvement au ravito du 37ème kilomètre, toujours pour prendre de l’eau. Le 38ème kilomètre est plus lent, 4’16’’/km mais à partir de ce moment-là, les 4 kilomètres restants seront chacuns plus rapides que le précédent. Mon rythme cardiaque est à présent plus élevé, autour de 163 bpm (il est resté sous les 160 bpm durant les deux premières heures). Mais toujours pas de baisse de régime, si bien que je commence à “rêver” d’un nouveau “record perso”, ce qui me rend encore plus euphorique. Au 40ème kilomètre, c’est le dernier ravito mais je ne m’y arrête pas ni, une fois n’est pas coutume, ne prend d’eau.
En réponse j’essaie de leur faire un cœur avec mes mains mais je dois déjà manquer un peu de lucidité car, à la place, c’est un signe « tout va bien » (comme les plongeurs) que je fais avec chacune de mes mains. Ces encouragements me donnent un énorme coup de boost, merci les Amis ! D’ailleurs le 22ème kilomètre est couru en 4’00’’. Et en parlant d’encouragements, sur le marathon d’Anvers, on entendait souvent “goed bezig !” (bon boulot). En Italie, c’était “dai ragazzi !” (allez les gars)… et en Espagne, c’est “animo !” (courage). Le 25ème kilomètre est celui couru le plus rapidement, en 3’54’’. L’allure moyenne depuis le départ est maintenant de 4’05’’/km. De temps-en-temps, sur base de mes sensations du moment, je me projete sur le chrono final possible, sachant que la baisse de régime surviendra tôt ou tard. Entre le 27ème et le 29ème kilomètre, ça devient à nouveau un peu plus dur, les kilomètres me paraissent plus long et à nouveau cette sensation soudaine et inquiétante, mais tout autant passagère qu’il y a 10 kilomètres, de faiblesse extrême. Seconde frayeur, mais qui n’a heureusement pas duré. Je prends mon 4ème gel au 29ème kilomètre, on vient de passer en face des tours de Serranos. Au 30ème kilomètre, je me sens à nouveau bien et sans raideurs ou douleurs dans le bas du dos, contrairement à mes marathons précédents. Depuis trois semaines avant le marathon, je fais des exercices quotidiens pour la prévention de la lordose lombaire ; ils semblent porter leurs fruits. Pas non plus de signes de crampes ni d’ampoules au pieds, tout va bien donc. Au 30ème kilomètre, l’allure moyenne depuis le départ se maintient à 4’05’’/km. Le 32ème kilomètre est couru en 3’56’’. Alors que sur tous les ravitos jusqu’à présent (tous les 5 kilomètres environ), j’ai toujours pris de l’eau sans marquer de temps d’arrêt, cette fois (33 ème kilomètre), je marque un bref arrêt. Je n’ai pas de difficulté à repartir mais je me dis que la perte de régime habituelle ne peut être qu’imminente à présent, et qu’il faudra bientôt y aller “au mental”. L’allure du 34ème kilomètre est de 4’22’’/km, ça devient plus difficile, mes quadriceps et, dans une moindre mesure, mes mollets sont de plus en plus durs. Chaque fois que je ralentis ou que j’ai l’impression de ralentir, j’arrive toujours néanmoins à relancer. J’en suis très agréablement étonné ! Arrive le 35ème kilomètre, je prends mon 5ème et dernier gel. Je scrute le panneau indiquant le kilomètre suivant. En effet, les kilomètres me semblent à présent de plus en plus “longs”. Toutefois, mon allure moyenne est toujours excellente, 4’06’’/km. Mes quadris et mollets deviennent de plus en plus durs, certes, mais je n’ai toujours pas de baisse de régime significative. A moins d’une grosse défaillance, le sub 3 me semble désormais presque acquis. Je m’arrête à nouveau brièvement au ravito du 37ème kilomètre, toujours pour prendre de l’eau. Le 38ème kilomètre est plus lent, 4’16’’/km mais à partir de ce moment-là, les 4 kilomètres restants seront chacuns plus rapides que le précédent. Mon rythme cardiaque est à présent plus élevé, autour de 163 bpm (il est resté sous les 160 bpm durant les deux premières heures). Mais toujours pas de baisse de régime, si bien que je commence à “rêver” d’un nouveau “record perso”, ce qui me rend encore plus euphorique. Au 40ème kilomètre, c’est le dernier ravito mais je ne m’y arrête pas ni, une fois n’est pas coutume, ne prend d’eau.  On vient de passer la Porta de la Mar. Finalement, durant un marathon, on est tellement dans une “bulle”, surtout vers la fin (en tous cas en ce qui me concerne) qu’il est difficle, a posteriori, de reconnaître les endroits par lesquels on est passé. La Rotonda del Mirador et les Tours de Serranos sont les seuls dont je me souviens. Au 41ème kilomètre, on aperçoit au loin la cité des Arts et des Sciences, site de l’arrivée du marathon. Il ne reste plus que 1200 mètres (3 tours de piste d’athlétisme !), la foule de spectateurs est maintenant très dense et l’avenue est plus étroite, si bien que le peloton de coureurs est plus dense. Ca me fait penser aux quelques centaines de mètres qui précèdent l’arrivée des 20 km de Bruxelles. On a le soleil de face et la chaleur de ses rayons est maintenant nettement perceptible. Je suis déchainé, le 41ème kilomètre est couru en 4’07’’, même si mes quadriceps sont maintenant très durs et mon rythme cardiaque élevé. On arrive sur le tapis bleu clair du site de l’arrivée, c’est magique ! Je vois le chrono au loin, il indique 2h54’25’’, je sprinte pour franchir la ligne sous les 2h55’. Je suis à 3’48’’/km sur les 500 derniers mètres. Je franchis la ligne alors que le chrono officiel indique 2h54’55’’. Lorsque j’arrête ma montre, elle indique 2h54’25’’. Sachant que j’ai franchis le tapis de départ plus de 30 secondes après le coup d’envoi du box “rose”, mon temps final officiel est de 2h54’23’’. C’est inespéré, j’ai peine à y croire !
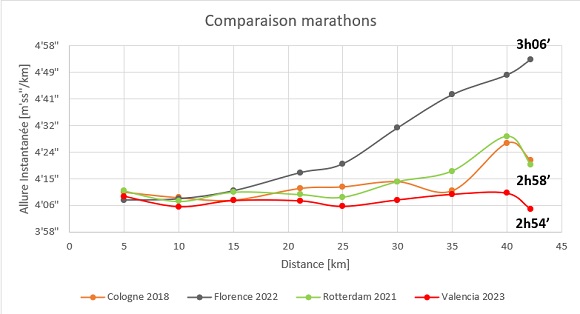
On vient de passer la Porta de la Mar. Finalement, durant un marathon, on est tellement dans une “bulle”, surtout vers la fin (en tous cas en ce qui me concerne) qu’il est difficle, a posteriori, de reconnaître les endroits par lesquels on est passé. La Rotonda del Mirador et les Tours de Serranos sont les seuls dont je me souviens. Au 41ème kilomètre, on aperçoit au loin la cité des Arts et des Sciences, site de l’arrivée du marathon. Il ne reste plus que 1200 mètres (3 tours de piste d’athlétisme !), la foule de spectateurs est maintenant très dense et l’avenue est plus étroite, si bien que le peloton de coureurs est plus dense. Ca me fait penser aux quelques centaines de mètres qui précèdent l’arrivée des 20 km de Bruxelles. On a le soleil de face et la chaleur de ses rayons est maintenant nettement perceptible. Je suis déchainé, le 41ème kilomètre est couru en 4’07’’, même si mes quadriceps sont maintenant très durs et mon rythme cardiaque élevé. On arrive sur le tapis bleu clair du site de l’arrivée, c’est magique ! Je vois le chrono au loin, il indique 2h54’25’’, je sprinte pour franchir la ligne sous les 2h55’. Je suis à 3’48’’/km sur les 500 derniers mètres. Je franchis la ligne alors que le chrono officiel indique 2h54’55’’. Lorsque j’arrête ma montre, elle indique 2h54’25’’. Sachant que j’ai franchis le tapis de départ plus de 30 secondes après le coup d’envoi du box “rose”, mon temps final officiel est de 2h54’23’’. C’est inespéré, j’ai peine à y croire !  Le second semi a été parcouru en 1h27’18’’ contre 1h27’05’’ pour le premier. Contre toute attente, je n’ai donc pas connu de baise de régime significative en fin d’épreuve. Je suis subergé par une multitude d’émotions (que j’écris à dessein au pluriel), c’est un moment indescriptible, je suis tellement content et ému… J’ai savouré ce moment en cheminant lentement sur l’aire d’arrivée, d’abord pour recevoir ma médaille, puis le ravito final. Par après, j’ai attendu mes Ami.e.s de la MRT. Gregorio est arrivé ensuite. Adeline, Aurore, Francesco, Camille et Julie terminent leur premier marathon, accompagnés par Nico, Salvatore et Manu. Maud franchira aussi la ligne d’arrivée pour son second marathon. Je suis égalemment terriblement content (et fier) pour eux ! Le ciel est bleu azur, il fait 18°. C’est l’éthiopien Sisay Lemma qui remporte cette édition 2023 du marathon de Valence en 2h01’48’’ (nouveau record du marathon de Valence). Chez les femmes, c’est l’éthiopienne Worknesh Degefa qui l’emporte en 2h15’51’’.
Le second semi a été parcouru en 1h27’18’’ contre 1h27’05’’ pour le premier. Contre toute attente, je n’ai donc pas connu de baise de régime significative en fin d’épreuve. Je suis subergé par une multitude d’émotions (que j’écris à dessein au pluriel), c’est un moment indescriptible, je suis tellement content et ému… J’ai savouré ce moment en cheminant lentement sur l’aire d’arrivée, d’abord pour recevoir ma médaille, puis le ravito final. Par après, j’ai attendu mes Ami.e.s de la MRT. Gregorio est arrivé ensuite. Adeline, Aurore, Francesco, Camille et Julie terminent leur premier marathon, accompagnés par Nico, Salvatore et Manu. Maud franchira aussi la ligne d’arrivée pour son second marathon. Je suis égalemment terriblement content (et fier) pour eux ! Le ciel est bleu azur, il fait 18°. C’est l’éthiopien Sisay Lemma qui remporte cette édition 2023 du marathon de Valence en 2h01’48’’ (nouveau record du marathon de Valence). Chez les femmes, c’est l’éthiopienne Worknesh Degefa qui l’emporte en 2h15’51’’.

Nous sommes restés à Valence jusqu’au mardi qui a suivi le marathon. Nous avons visité Valence, profité de la villa, du soleil et même de la piscine…
Carte du parcours

Les bilans
D’abord le bilan personnel :
- Très grande satsfaction du résultat, même inespéré !
- Un plan de préparation intensif, dont je ne me suis réellement rendu compte de l’ampleur que lorsque je l’ai encodé dans un fichier Excel à l’issue du marathon
- L’inclusion de renforcement musculaire et de gainage a certainement été d’une grande valeur ajoutée
- Pas de baisse de régime en fin d’épreuve, 1h27 sur le premier et sur le second semi
- Pas de frottements et pas d’ampoules aux pieds à la fin du marathon
- Des conditions météo idéales
Mon avis sur ce marathon :
- Le coût : 180€ ! Même si je m’y suis pris tard pour m’inscrire, je n’ai jamais payé aussi cher pour un marathon, ni même pour mon premier triathlon de format “70.3” !
- Organisation irréprochable
- Ravitaillements bien organisés. Je préfère les bouteilles aux gobelets mais il faut avouer que ça génère beaucoup de gaspillage et de déchets de plastique…
- Parcours plat et rapide
- Indication de la distance tous les kilomètres
- Pas de semi-marathon, uniquement un marathon, ce que je trouve être un plus
- Public nombreux et supportif
- Très belle médaille, mais de piètre qualité, la “dorure” s’effrite facilement… Je ne suis pas fétichiste mais à ce prix, la médaille pourrait être de meilleure qualité
- L’aire d’arrivé à la cité des Arts et des Sciences est juste “magique” !
Téléchargez cette publication sous forme de fichier pdf : Marathon Story – Valencia 2023 – Gaetan Horlin1
PACE