Compte rendu du contest VUSHF subrégional des 6 et 7 mai 2023. Comme d’habitude, participation limitée, surtout le dimanche, où je n’ai été actif que durant 3 heures en tout. Propagation très médiocre le samedi sur 144 MHz, signaux dans l’ensemble faibles. Sur 10 GHz, il y avait un peu de rain-scatter (RS) relativement local, pas de grands DX possibles donc. Essai infructueux avec DK0NA (JO50TI), que j’ai toutefois très bien entendu jusqu’à 579 (mais furtivement) en airplane-scatter (AS). Côté France, si les “Journées d’activité hyper” stimulent bien l’activité, les contests subrégionaux ne génèrent que peu, voire pas d’intérêt. C’est dommage. J’ai contacté F6DKW et F5HRY (merci à eux) comme seules stations françaises sur 10 GHz. Sur 144 MHz, avant de passer QRT pour la nuit le samedi soir, le meilleur DX était OM2Y à 990 km (en CW). J’ai entendu à plusieurs reprises EA2DR (IN83FD) à 1005 km mais mes appels sont restés sans réponse (?!). Sur 10 GHz, il n’y avait alors que 7 QSO’s dans le log. F5HRY en était le meilleur DX (242 km). Dimanche matin, tôt, avant de passer QRT jusque +/- 12h UTC en raison d’une compétition sportive, les stations OK étaient particulièrement fortes sur 144 MHz, si bien que OM3KII était contacté facilement en SSB (1006 km). Ecoutez l’enregistrement audio plus bas, en fin de publication. Vient ensuite dans le log OM5ZW en JN98AS (1032 km) contacté en CW. Reprise de l’activité à 12h30 UTC, il y a du rain-scatter sur 10 GHz… 9 QSO’s (certains en random, sans prise de sked) sont ajoutés au log, dont DK0NA (542 km), contacté en RS via un scatter point en JN39. Ecoutez l’enregistrement du QSO ci-dessous. Le contest prend fin avec un total de 16 QSO’s sur 10 GHz et 106 sur 144 MHz, en privilégiant la recherche des DX (mode S&P) plutôt que les sessions d’appels (mode Run). Sur 144, j’ai été appelé par EA4LU (IM68TV). Il s’agissait évidemment d’un burst météor-scatter (MS) mais la réflexion n’a pas duré assez longtemps que pour compléter le QSO. Plusieurs essais avec IO2V et IQ4KD (tous les deux en JN54) sont restés infructueux, ce qui est très rare !
Petite remarque sur la prise de skeds via ON4KST : certaines stations demandent des skeds “tous azimuths”, sans nécessairement tourner les antennes vers le correspondant sollicité… c’est évidemment une perte de temps !
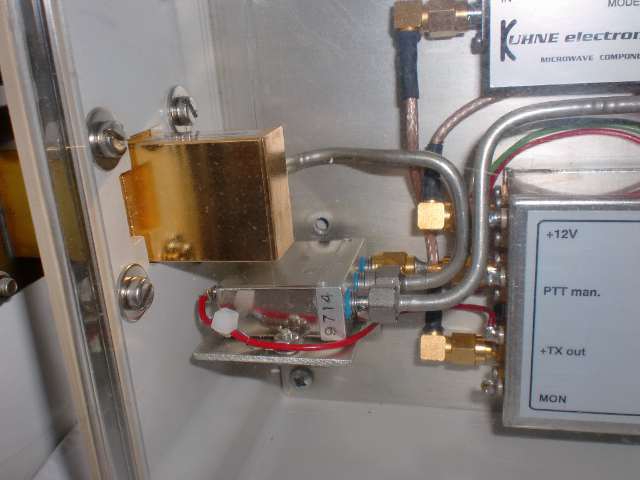
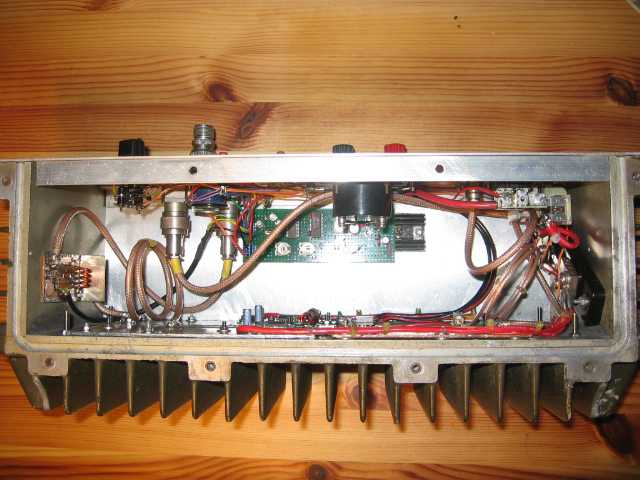
Station utilisée : 2×9 él. DK7ZB + 1,2kW sur 144 MHz et parabole de 48 cm + 3W sur 10 GHz.
Report of the sub-regional VUSHF contest of May 6 and 7, 2023. As usual, limited participation, especially on Sunday, where I was only active for 3 hours in total. Very poor propagation on Saturday on 144 MHz, overall weak signals. On 10 GHz there was some relatively local rain-scatter (RS), so no great DX possible. Unsuccessful attempt with DK0NA (JO50TI), which I heard very well up to 579 (but furtively) in airplane-scatter (AS). On the French side, if the “Journées d’activité hyper” stimulate the activity, the subregional contests generate little or no interest. This is a shame. I contacted F6DKW and F5HRY (thanks to them) as the only French stations on 10 GHz. On 144 MHz, before going QRT for the night on Saturday evening, the best DX was OM2Y at 990 km (in CW). I heard EA2DR (IN83FD) several times at 1005 km but my calls were not answered (?!). On 10 GHz, there were only 7 QSO’s in the log by then. F5HRY was the best DX (242 km). Early Sunday morning, before going QRT until +/- 12h00 UTC due to a sports competition, the OK stations were particularly strong on 144 MHz, so that OM3KII was easily contacted in SSB (1006 km). Listen to the audio recording below, at the end of the publication. Next in the log is OM5ZW in JN98AS (1032 km), contacted in CW. Activity resumes at 12h30 UTC, there is rain-scatter on 10 GHz… 9 QSO’s (some in random, without sked) are added to the log, including DK0NA (542 km), contacted in RS via a scatter point in JN39. Listen to the recording of the QSO hereunder. The contest ends with a total of 16 QSO’s on 10 GHz and 106 on 144 MHz, with the emphasis on DX search (S&P mode) rather than calling sessions (Run mode). On 144, I was called by EA4LU (IM68TV). It was obviously a meteor-scatter (MS) burst but the reflection did not last long enough to complete the QSO. Several attempts with IO2V and IQ4KD (both in JN54) were unsuccessful, which is very rare!
A small remark on sked taking via ON4KST: some stations ask for “all azimuths” skeds, without necessarily turning the antennas towards the requested correspondent… it is obviously a waste of time!
Station used: 2×9 el. DK7ZB + 1,2kW on 144 MHz and 48 cm dish + 3W on 10 GHz.
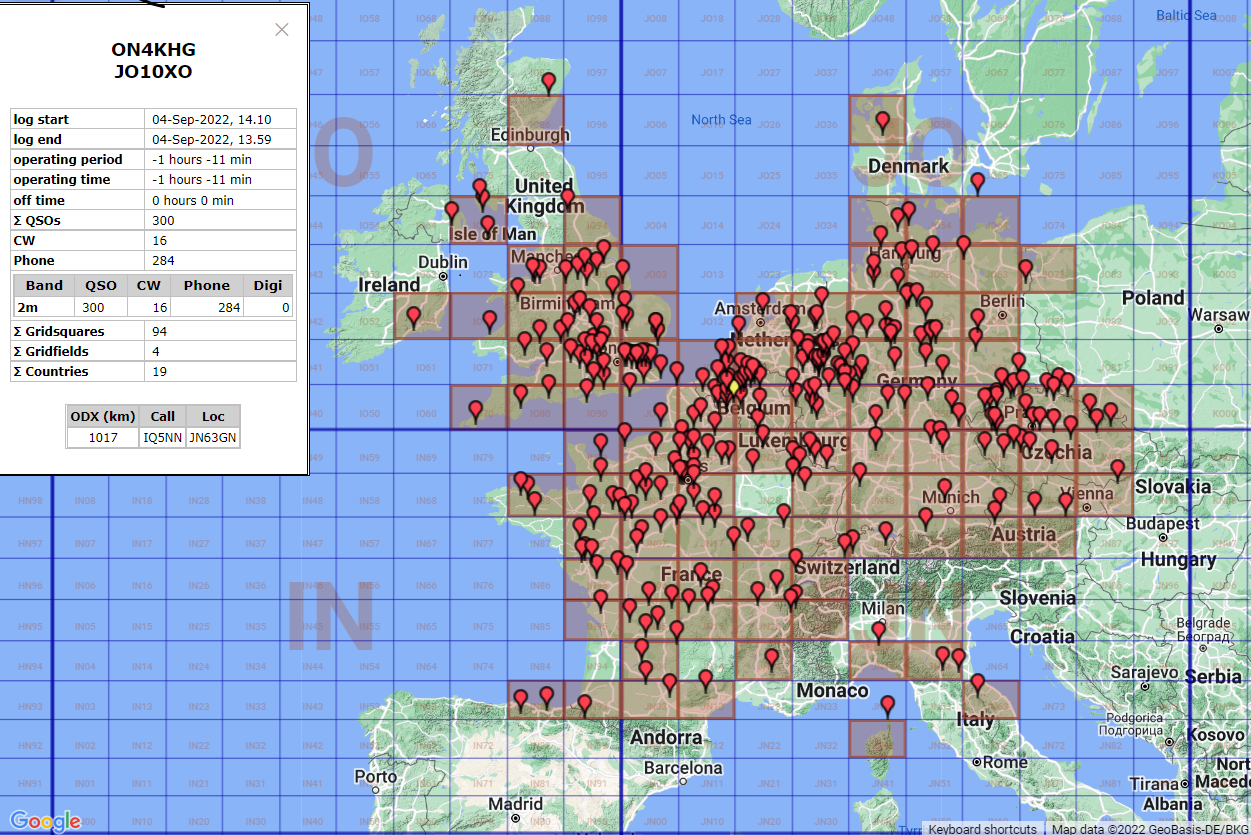
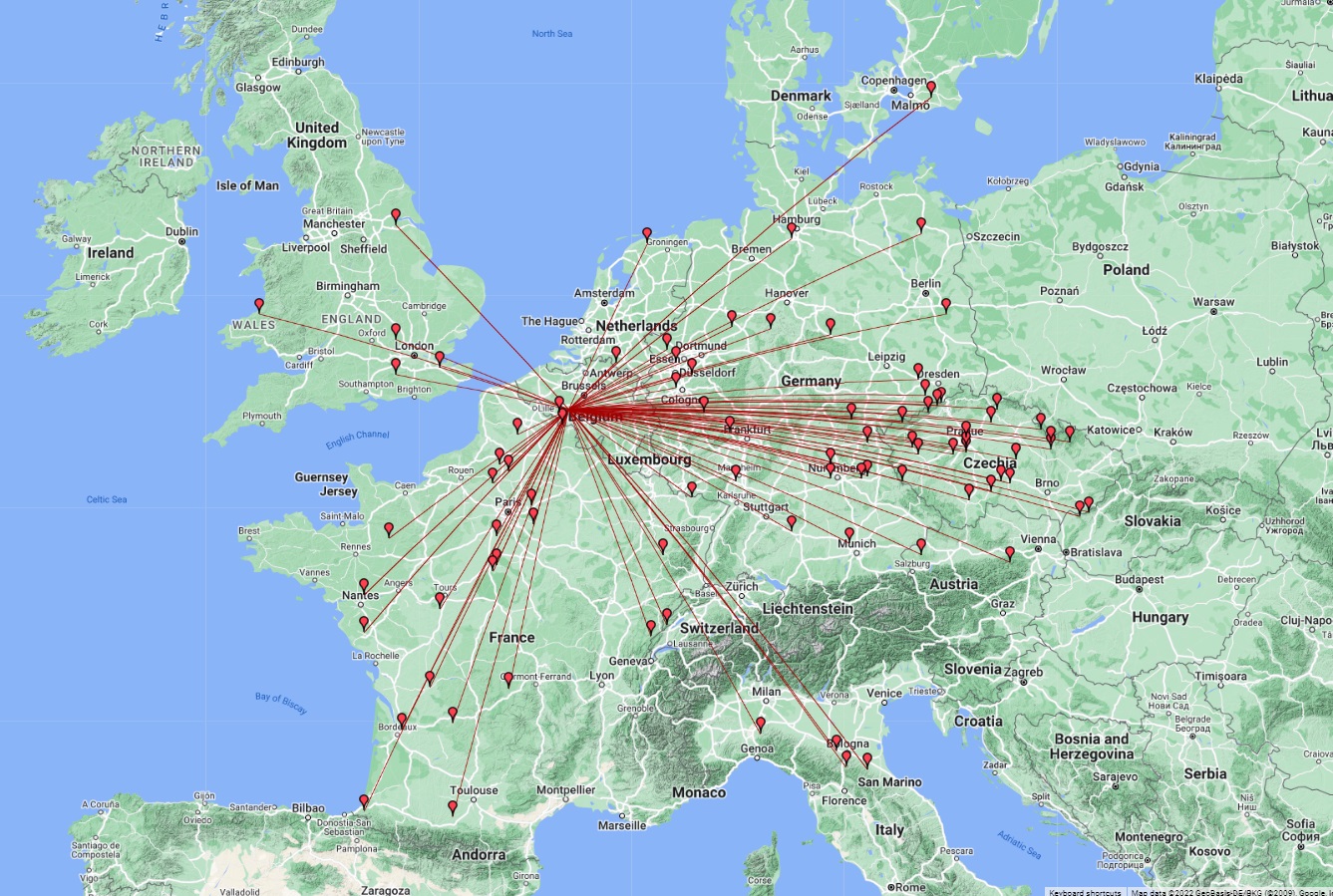
144 MHz
# QSO’s : 106
Points : 46695
# DXCC : 8 (HB9, OE, OK, OM, DL, ON, PA, F)
# WWL : 49
Average km/QSO : 441
Top 10 DX QSO’s :
OM5ZW JN98AS 1032 km OM3KII JN88UU 1006 km OM2Y JN88RS 991 km OK2O JN89IW 909 km OL7M JO80FG 886 km OK1KCR JN79VS 847 km OK1KKI JN79NF 814 km OE5LHM/P JN78CN 773 km OK1KQH JN79GO 763 km DF0UM JO73CE 759 km
Le signal SSB de OM3KII (JN88UU) / The SSB signal of OM3KII (JN88UU) :
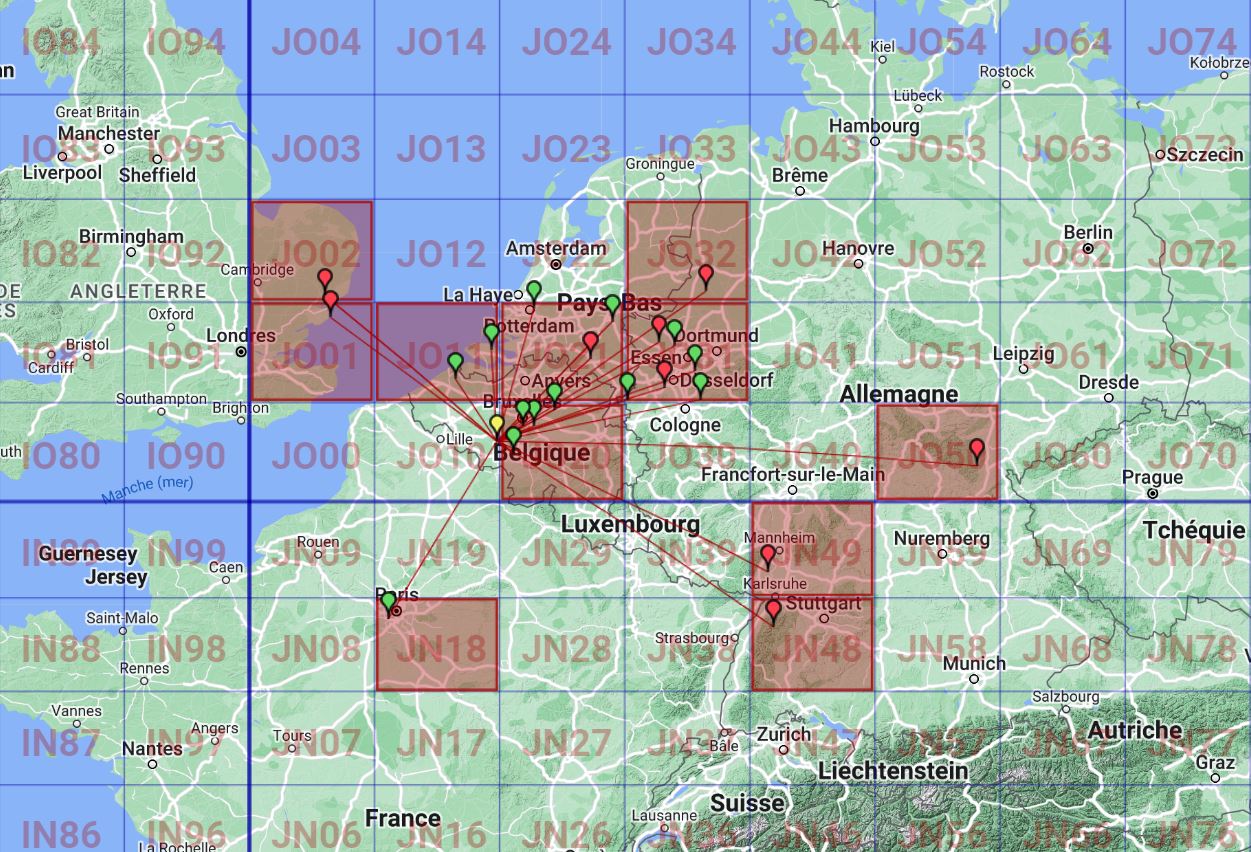
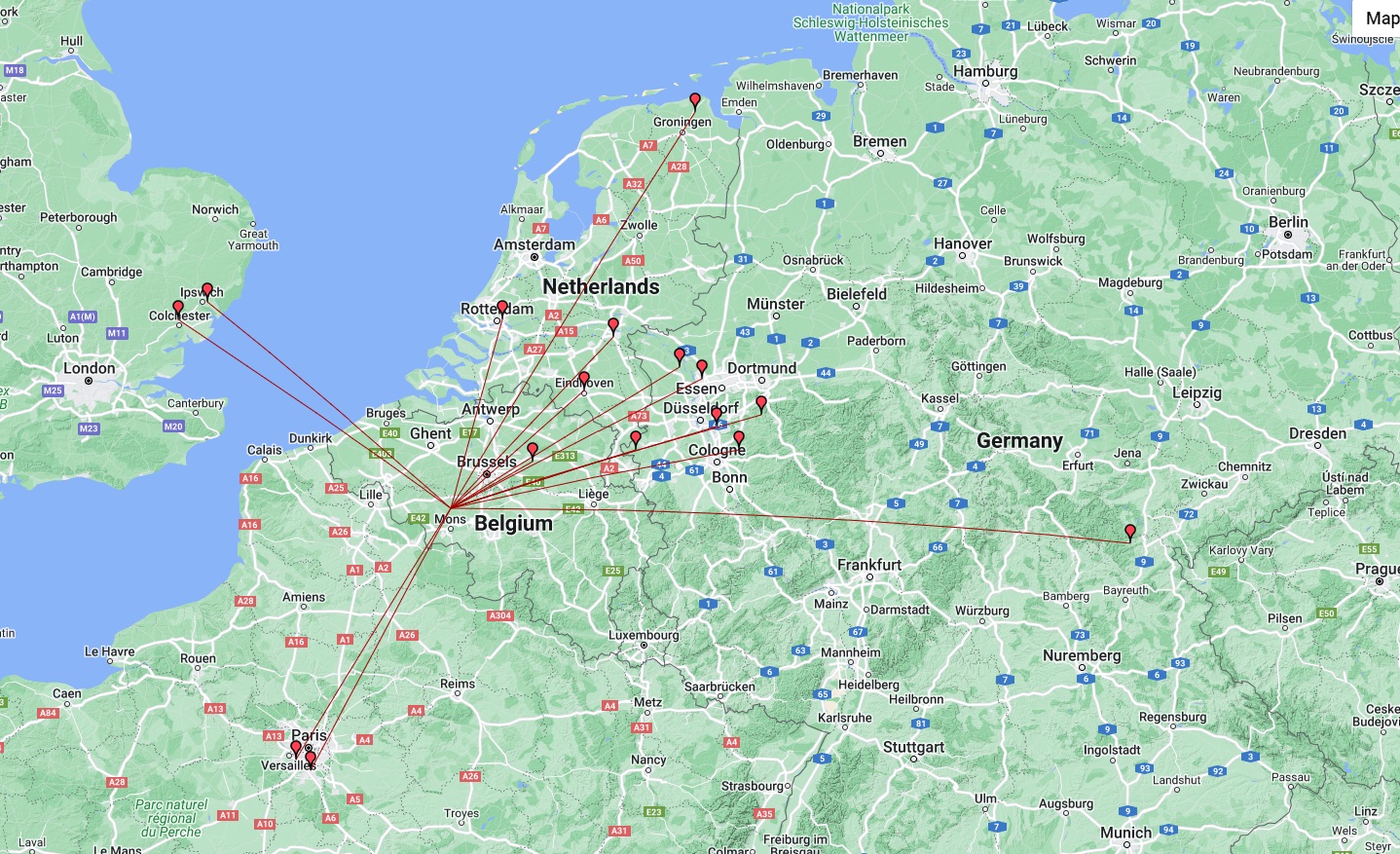
10 GHz
# QSO’s : 16
Points : 3752
# DXCC : 5 (F, PA, ON, DL, G)
# WWL : 8
Average km/QSO : 234
ODX QSO : DK0NA JO50TI 542 km
Le signal de DK0NA (JO50TI) en rain-scatter / The signal of DK0NA (JO50TI) in rain-scatter :
SPACE