Lors de la réalisation de l’amplificateur de puissance 144 MHz 600W à LDMOS, la nécessité de pouvoir mesurer une puissance supérieure à 500W (sur 144) s’est faite sentir. Les Bird 43 sont relativement chers, il faut des bouchons. Achetés sur Internet ou en brocantes, leur origine est incertaine, ainsi que la manière dont ils ont été manipulés au préalable. Il me fallait autre chose !
J’ai donc décidé de construire moi-même mon wattmètre. L’option choisie était de réaliser un coupleur directionnel qui prélèverait environ -50 dB du signal à mesurer. 60 dBm (1kW) – 50 dB = 10 dBm, soit 10mW, ce qui est facile à mesurer à l’aide d’un circuit intégré AD8307 (détecteur logarithmique de chez Maxim) dont je disposais d’un échantillon.
Pour réaliser le coupleur directionnel, j’ai pris du coax à diélectrique Teflon (RG142), qui tient 1kW sur 144. J’ai enlevé la gaine et la tresse sur environ 4 cm. J’ai remplacé la tresse par un feuillard en cuivre (épais) que je n’ai pas refermé complètement, il subsistait donc une fente. Ensuite, j’ai pris un bout de coax semi-rigide (UT-141), que j’ai limé pour enlever le cuivre et ainsi laisser également une fente. Finalement, j’ai disposé la fente du RG142 (ligne principale) en regard de celle de l’UT-141 (ligne couplée) et j’ai refermé le feuillard en cuivre en le soudant sur l’UT-141. J’ai terminé la ligne couplée par un petit potentiomètre, que j’ai ajusté pour atténuer au maximum l’onde réfléchie, et ainsi maximiser la directivité (= la capacité du coupleur à discriminer l’onde incidente de l’onde réfléchie au cas où la charge qui termine le coupleur ne présente pas 50 ohms). Plus la directivité sera grande, plus la mesure de VSWR (ROS) sera précise. Si on ne fait que des mesures de puissance sur charge de 50 ohms, la directivité n’a pas d’importance, puisqu’il n’y a pas d’onde réfléchie (ou si peu).

SPACE
 SPACE
SPACE
Le facteur de couplage sur 144 est de -48,5 dB (= un signal qui passe dans la ligne principale est disponible sur le port de la ligne couplée atténué de 48,5 dB). La directivité est de 25 dB (toujours sur 144) et la perte d’insertion de 0,01 dB.
SPACE
SPACE
Sur 2,3 GHz, la perte d’insertion n’est toujours que de 0,04 dB mais la directivité tombe à 8 dB. Sur 1,3 GHz, elle est de 14,9 dB.
SPACE
SPACE
SPACE
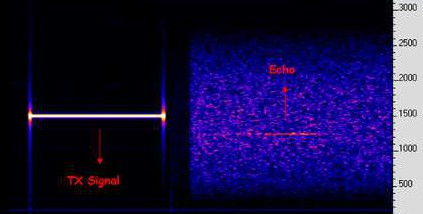
Exemple pratique de mesure : mon SSPA 144 MHz de 300W. Sur les photos, on voit que l’analyseur de spectre qui termine le port couplé indique 6,54 dBm (en haut à droite). On sait que le signal sur le port couplé est -48,5 dB de celui qui passe dans la ligne principale, et donc que dans la ligne principale on a +48,5 dB par rapport à ce qu’on mesure sur le port couplé. En l’occurrence, 6,54 dBm + 48,5 dB (pas dBm ici) = 55,04 dBm, ce qui, converti en Watt, donne 320W dans la ligne principale, et donc à la sortie de l’ampli.
L’étape suivante consiste à substituer l’analyseur de spectre par un détecteur logarithmique construit sur base du CI AD8307 (Maxim) et qui donne une tension de sortie linéaire en fonction de la puissance d’entrée (+0,25 mV out pour chaque dB de plus à l’entrée), entre 0 et 500 MHz. Ce, de -70 à +10 dBm. L’ensemble coupleur directionnel + AD8307 permettra de mesurer de -70 à (10+48,5) dBm, soit de 0,1µW à 700W, voire plus avec un atténuateur entre le coupleur et l’AD8307 (avec un max de 1kW pour la bonne tenue du RG142).
La réalisation du détecteur autour de l’AD8307 est basée sur un article de W7ZOI et W7PUA paru en 2001 dans la revue QST : “Simple RF-Power measurement“. L’AD8307 étant tellement sensible, il est indispensable de bien découpler et disposer des perles de ferrite sur l’alimentation du détecteur. Inutile de dire qu’il doit être disposé dans un boîtier impérativement métallique (blindage). Les performances du détecteur on été mesurées à l’aide d’un générateur professionnel (SMC100 de Rohde & Schwarz), comme ci-dessous, la mesure de la tension détectée et présente en sortie de l’AD8307 en fonction de la puissance injectée à l’entrée :
On remarque l’excellente linéarité entre -60 et 10 dBm et en-dessous de 500 MHz.
Le graphique qui suit donne une image de la réponse en fréquence du détecteur. Pour ce faire, on injecte une puissance constante en entrée (ici -30 dBm), tout en faisant varier la fréquence. On voit bien que la réponse n’est pas plate et on mesure un écart maximum de 0,23V (2,48V @ 30 MHz – 2,25V @ 500 MHz). Sachant que la tension en sortie du détecteur varie en moyenne de 0,046V par dB de puissance RF en entrée (déduction faite à partir du graphique précédent), on conclut qu’il y a une différence de 5 dB (0,23/0,046) entre le haut et la bas de la plage de fonctionnement du détecteur.
Sachant donc que la réponse du détecteur n’est pas plate sur toute la plage de fonctionnement et pour garantir une précision suffisante, j’ai décidé de calibrer le détecteur uniquement sur les bandes amateur, chacune possédant alors ses propres paramètres de calibration. A la fréquence médiane de chaque bande considérée (10m, 6m, 4m, 2m et 70cm), une puissance de -60 à 10 dBm a été injectée par pas de 5 dB en entrée du détecteur et la tension de sortie mesurée à chaque pas. Le tout a été reporté sur un graphique et l’équation de la droite (visible en haut à gauche sur le graphique) qui passe “au mieux” par chaque point a été dérivée (possibilité offerte par MS Excel). On peut voir ci-dessous un exemple de tel graphique (pour la bande des 2m) :
Et pour garantir encore plus de précision, une seconde équation de calibration a également été calculée mais cette fois sur une plage dynamique plus restreinte, à savoir de -10 à 10 dBm. Celle-ci permet dès lors de mesurer avec une grande précision de -10 dBm (entrée en direct sur le détecteur) à 58,55 dBm (58,55 = 10+48,55, le facteur de couplage du coupleur directionnel sur 144 MHz) lorsqu’on utilise de coupleur directionnel avec le détecteur, soit donc de 0,1mW à 710W. Voici la droite de calibration sur la plage -10 à 10 dBm sur 144 MHz :
L’article d’origine prévoyait d’afficher la tension de sortie de l’AD8307 sur un galvanomètre à aiguille. J’ai souhaité le remplacer par un afficheur LCD, que j’ai développé autour d’un Arduino Uno, d’autant que la tension de sortie du détecteur variant grosso modo de 0 à 5V, se prête bien à être injectée sur une entrée DAC d’un Arduino. De plus au travers de la programmation de l’Arduino, on peut considérer les équations des différentes droites de calibration par bande et ainsi afficher la puissance en dBm (ou autre unité) sur l’afficheur LCD.
Quid de la résolution ? Pour chaque dB de plus sur l’entrée RF, on a vu précédemment que pour chaque dB de plus à l’entrée du détecteur, la tension à la sortie du détecteur AD8307 augmente de 0,046V. Sachant que l’Arduino échantillonne sur 10bits (2^10 = 1024 niveaux), 5V/1024 = 0,0049V, ce qui est environ un dixième de 0,046V. La résolution de la mesure est donc d’environ 0,1 dB, soit une incertitude de 12W sur une mesure de 500W. Photos de l’ensemble terminé :

SPACE
Le “gros” boîtier, celui qui comporte l’afficheur LCD, renferme également l’Arduino, ainsi qu’une batterie de 12V. C’est le meilleur moyen d’alimentation que j’ai trouvé, garantissant une autonomie suffisante (une simple pile de 9V ne l’est pas). L’utilisation d’une alimentation externe est à proscrire car, même bien décuplée, elle “ramène” des signaux/bruit qui faussent la mesure du wattmètre. Le câble de liaison (alimentation du détecteur + tension mesurée, issue du détecteur) entre le boîtier LCD et le détecteur (petit boîtier) doit être muni de plusieurs ferrites, comme montré sur les photos.
J’ai également adjoint au programme Arduino la possibilité d’afficher, sous forme de bar graph, le niveau de champs (“Field Strength Meter”) ; c’est une mesure relative, pas absolue.
Les menus du wattmètre ont été définis comme suit :
- Mode
- Power (affiche la puissance)
- Voltage (affiche la tension en sortie de l’AD8307)
- Battery (affiche la tension de la batterie)
- Field strength (affiche le niveau de champs)
- Band
- Unit
- Coupler
- Mesure directe (sans coupleur directionnel)
- Mesure avec coupleur directionnel
- Range
- Etendue (celle avec la calibration de -60 à 10 dBm)
- Haute résolution (celle avec la calibration de -10 à 10 dBm)
Le programme Arduino est disponible ici et un brouillon d’article (non terminé) ici.
SPACE